Al's Robotics....
| Site
Index |
| Site Index |
| Rambo Auto Tools |
| Robotics Events |
| Linux Computing |
| Reading Books |
| Latest
News |
new information added to the Robux Project Pages click here for more info |
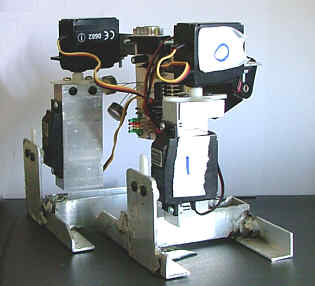
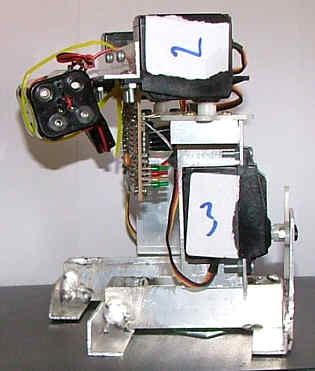
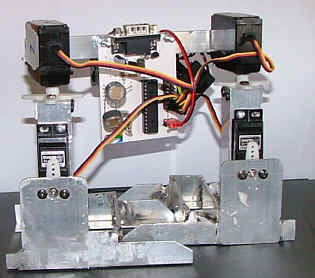
Zee Scale
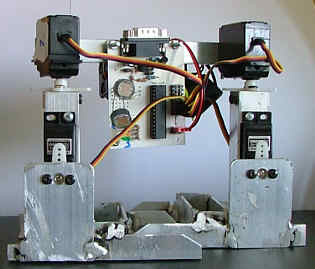
Zee Scale is a two legged 4 servo walking robot. It uses it's large surface area feet to gain stability while walking transferring it's weight from side to side. At the time of writing Zee Scale is in a very basic form and is only capable of walking forwards with a bit of a waddle. As you can see from the first video it's a little clumsy at the moment but I will sort this out soon while I’m tidying up the walking algorithm. Once I get the walking part sorted out I’ll start to add sensors and a bit more intelligence to it so that it can avoid obstacles and such.
Second video is of a refined version of Zee Scale, walks a little smoother
Specifications:
- 4 Acoms AS-12 servos
- PIC 16F876A micro controller
- Aluminium Chassis
- 4 NiCad Batteries (this will be changed to Lithium Polymer to reduce weight)
- Sensors to
be decided (possibly IR and Ultrasonic)
Web pages built and © by A R Martin E-mail at:
Home-page Robots Tutorials Links E-mail Circuits Events BEAM PIC Microchip Robotics Shop Computers FMM-RobotWars Sponsors Suggested reading Ebay Listings Serial Speed Controllers MicroMouse Walkers Driller-Killer Laptops Excaliber Robot Retox Drill Robot Robot motors Robot Builder Google Robux Project gorobotics Robot Cafe Robotics Solar Navigator PIC Axe Tech Supplies MUTR GSM Control Home Automation RC tracker Qtronics Design - Electronics & Firmware Design Artist R C Martin http://www.speedace.info/qtronics.htm http://www.solarnavigator.net/qtronics.htm http://www.elecdir.com/site/store/23197/index.html http://www.robotbuilder.co.uk/forum/topic.asp?whichpage=2&TOPIC_ID=861ᶱ